What is an AUV?
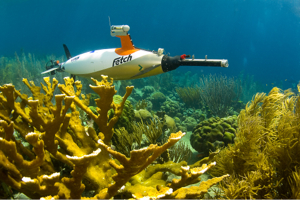
An Autonomous Underwater Vehicle (AUV) is a free-swimming, untethered robot under the control of an onboard computer. AUVs can be thought of as computer-controlled taxicabs for a wide range of sensors.
The current generation of AUVs range in length from 5 to 18 feet (1.5 – 5.5 meters) and weigh in air from 45 to more than 3,000 pounds (20-1,400 kilograms). Most are torpedo-shaped to reduce drag. AUVs are slightly positively buoyant. This ensures the AUV will surface even if onboard control systems have failed.They need to continuously maintain some degree of horizontal motion, and do not collect physical samples.
AUVs are battery powered. Small AUVs can deploy for several hours, while large vehicles can swim for several days. Survey speeds are usually 2-4 miles per hour (1 - 2 meters/second), chosen to maximize range for the onboard battery power. Many vehicles are capable of surveying to continental-shelf depths, with a few capable of full ocean depth.
AUVs can gather data with sufficient resolution in time and space to provide an understanding of nature’s dynamics. AUVs are well-suited to carry out swathe mapping (detailed 3-D mapping of the seabed using sonar), and large-area surveys. They can carry multiple payloads, allowing synoptic coverage; for example an AUV may simultaneously image the seafloor while measuring water quality. AUVs routinely carry fluorometers, turbidity and turbulence sensors, magnetometers, and water-quality sensors.
An AUV's underwater position can be determined using acoustic positioning relative to a surface vessel or subsea transponders, by dead-reckoning using a Doppler Velocity Log to measure speed over the bottom and direction using a compass, or by inertial navigation whereby the accelerations and rotations of the AUV are measured and equations of motion solved.
AUVs are driven by a propeller, or in the case of gliders (AUVs with a pair of fixed wings), through changes in buoyancy that generate lift, allowing lateral movement through the water. Propeller-driven AUVs are favored for near-bottom surveys; gliders are typically used offshore to investigate currents, water-column productivity, or water-mass structure.
Unlike remotely operated vehicles (ROVs), AUVs fly pre-programmed missions, often “mowing the lawn” to survey the seafloor, or “yo-yoing” over a reef to measure water quality. However, the flight path can be dynamically altered by the AUV, to adaptively sample features of interest. Communication with the AUV during the mission can occur via acoustic modem when submerged, or via radio frequency (cell phone, WiFi, satellite) when the vehicle surfaces.
AUV technology had an intense research and development phase during the 1990s funded largely by national defense agencies, with commercial vehicles not widely available until around 2000. AUVs and ROVs are increasingly used in oceanography because they enable the collection of data that might not be otherwise obtainable. They moreover reduce the risk or cost compared to other sampling methods such a SCUBA diver, towed platform, or ship.