
Fetch

From L: Graduate students Lorraine Brasseur, Justin Vandever, Rob Condon, and Jarrell Smith pose with Professor Mark Patterson and classmate Taiping Wong before launching Fetch from the Yorktown waterfront.
Photo by David Malmquist.

VIMS graduate student Lawrence Carpenter prepares the autonomous underwater vehicle Fetch for a research mission in the Florida Keys.
Photo by David Malmquist.
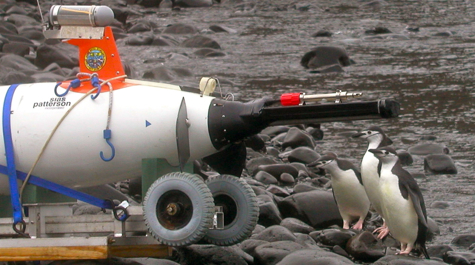
A trio of chinstrap penguins investigate the robotic vehicle Fetch while it awaits deployment from the rocky shore of Livingston Island, South Shetland Islands, Antarctica.
Photo by Dr. Mark Patterson.

Dr. Mark Patterson performs trials with the robotic vehicle Fetch to find out what blue crabs and jellyfish look like on sonar. Student assistant David James lends a hand.
Photo by David Malmquist.
A pioneering robotic sub that continues to push the envelope
Dimensions
6.5 feet long, 220 pounds
Maximum Diving Depth
500 feet
Power Source
Rechargeable batteries, charged on boat or docking station
Battery Life
18 hours per charge (at 3 knots)
Range of Motion
Can move vertically; propeller enables forward motion
Features
- GPS
- Wi-Fi
- Microwave RF modem
- CTD sensor
- Altimeter
- Side-scan sonar
- Video camera
Applications
- Capture video of ocean floor
- 2-D imaging of animals and plants
- Measure water quality and temperature