The Jefferson Benthic Sled
A viable new tool
 Benthic Imaging Sled Benthic Imaging Sled developed and deployed to map benthic habitats by real-time acquisition of underwater photographs, video, and water quality data, and to ground truth sidescan sonar records.
Benthic Imaging Sled Benthic Imaging Sled developed and deployed to map benthic habitats by real-time acquisition of underwater photographs, video, and water quality data, and to ground truth sidescan sonar records.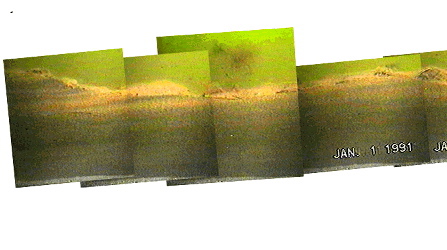 Benthic Profile Images from the SPI Plow (Burrow-Cutter-Diaz Plowing Profile Camera) Sled.
Benthic Profile Images from the SPI Plow (Burrow-Cutter-Diaz Plowing Profile Camera) Sled.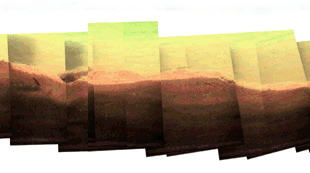 Benthic Profile Images from the SPI Plow (Burrow-Cutter-Diaz Plowing Profile Camera) Sled.
Benthic Profile Images from the SPI Plow (Burrow-Cutter-Diaz Plowing Profile Camera) Sled.
Description of System
The Jefferson Sled and Plowing Video Profile Camera is configured to collect real-time video from the plowed furrow created by an agricultural plow attached to the sled. The profiling camera prism mounts behind the plow so that the prism window is flush with the flat, vertical side of the plow, and enables viewing the sediments in profile as the plow slices through the uppermost layers (10 - 20 cm) of sediment. The prism was modified to accept an underwater video camera housing and lighting rather than the typical still camera and flash.
The image displayed above is a compilation of digitized versions of the video sequence taken 2/22/96 from the York River, Virginia. The video was recorded on Hi-8 tape, and the lighting was supplied by a 12V/20W bulb. The video system was powered by a standard marine battery on the vessel, and zoom and focus were controlled from the vessel. Remote control and power are achieved through a 400 ft. long underwater cable. Sled tow transects are continuously logged on the vessel as GPS coordinates. A water quality sensor system (Hydrolab Datasonde) attached to the sled allows continuous acquisition of water depth, temperature, salinity, dissolved oxygen, and pH. Additional video and still cameras have been be affixed to the sled and have successfully provided close-up plan-view and oblique-view images of the sediment surface.
Post processing of digitized video images allows quantification of microtopography, fauna, and sediment attributes. The image above is a mosaic of several video frames acquired from a short section of one sled transect. This reconstruction of the bottom was accomplished by manual alignment of images using visual surface and subsurface features to register them. A level installed in the prism now depicts fore-aft inclination angle, allowing bottom reconstruction using sled-tilt angles observed during deployment. The compilation image is analogous to a very detailed acoustic sub-bottom profile image. Resolution is now limited by the frame grabber board. The real-time and assembled plowing video profile images should be very useful to side-scan sonar ground-truthing efforts, enabling rapid determination of sources of variation in the broad-scale acoustic reflection patterns.
Capabilities
- Real-time, high-resolution video acquisition of surficial sediments in profile, viewed and controlled remotely.
- High-resolution plan-view or oblique-view still photography or video.
- Water quality parameter monitoring (temperature, salinity, dissolved oxygen, pH, depth), which may be observed real-time.
Future Development
- Interleaving of GPS data, water quality sensor data, and digitized video during deployment.
Applications
- Benthic habitat delineation/mapping
- Assessment of benthic living resources
- Assessment of disturbance impacts
- Ground-truthing for side-scan sonar surveys
- Evaluation of parameters within water-quality models
- Dredged-material surveys